Robotic Insects
May 8, 2013
If you show a
nickel and a
dime to a
child too young to understand their
monetary value and ask him to choose which one he wanted, he would choose the nickel, simply because it's bigger. Larger things and larger quantities obviously have more value than the smaller. This principle doesn't vanish when the child becomes an
adult. He wants the larger
automobile when a smaller one would suit his needs and benefit the
environment.

When I was a child, you could buy "penny candy" at the corner store. These were quite large chunks of confection sold for just a penny.
Sales tax had not been invented, and there were still many corner stores.
(Via Wikimedia Commons.)
Fictional robots of the past were huge, also.
Gort, the robot in the classic
science fiction film, "
The Day the Earth Stood Still," (1951,
Robert Wise, Director), was eight
feet tall.[1] As I wrote in the article
Teen Scientists (February 1, 2013),
Tom Swift had a large robot, a fact that can be gleaned from the 1954 book title, "Tom Swift and His Giant Robot."
Nowadays,
consumers prefer their
technology to be small. Smaller
tablet computers have superseded
desktop computers for many applications, and there are
personal music players replacing the bulky
stereo systems of the past. The trend to the smaller-can-be-better mentality has extended to
robotics. As I wrote in a
previous article (Pop-Up Robots, February 23, 2012),
governments would like to procure the proverbial "
fly-on-the-wall," a minuscule flying robot for
surveillance.
First a
disclaimer of sorts. I'm a long time member of the
Electronic Frontier Foundation, and I oppose
unwarranted government surveillance of its
citizens. However, appropriate
intelligence gathering to preserve
public safety has become increasingly important in today's world. Somewhere there's a middle ground, but I'm not skilled enough to know where to draw the line.
There have been some impressive demonstrations of small-sized flying robots.
Engineers at the
General Robotics, Automation, Sensing and Perception (GRASP) Laboratory of the
University of Pennsylvania have demonstrated "nano quadrotors," which are
helicopter-type objects, about the size of a
human hand.[2] There's a
YouTube video showing the nano quadrotors doing
synchronized flying.[3]
Engineers at
Harvard University's School of Engineering and Applied Sciences and
Wyss Institute for Biologically Inspired Engineering have decided to pursue an
insect model for robotic flight. Their
coin-sized device, which is quite a bit smaller than the nano quadrotors, is called a "Mobee," for
monolithic bee (see photograph).
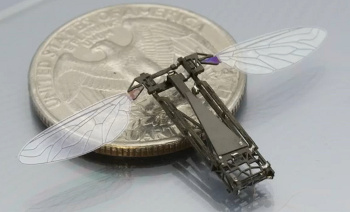
Are coins a subliminal subtopic of this article?
The 2012 version of the Mobee was 2.4 millimeters tall, and it had about 2% the mass (90 mg) of a US quarter.
(Screen capture from a YouTube video).[4)]
As can be seen, the Mobee uses flapping
wings instead of rotating
airfoils for flight. One unique feature of the Mobee is its fabrication. It's built as a
lamination of many layers of dissimilar
material, including
carbon fiber,
titanium,
brass,
ceramic,
adhesive, and
Kapton for the
hinges (see figure). The 2012 version had eighteen
laser-cut laminations which "popped-up" from the plane to form the robot.
Making a micro hinge.
Kapton is used as the hinge layer in the Harvard Mobee.
(Screen capture from a YouTube video)[4]
The Harvard Mobee work is part of a
National Science Foundation funded RoboBee project led by
Robert J. Wood, an
Associate Professor of
Electrical Engineering. The present version of the Mobee has a reduced weight of 80 milligrams. Its wings flap 120 times per second, powered by
piezoelectric "muscles."[5-7] The Harvard team has demonstrated stable hovering and basic flight maneuvers for a
tethered, but unconstrained, Mobee.[5]
For flight control, each wing is controlled independently in real time.[6] As for real insects, airflow effects have a big effect on
flight dynamics. The
control system needs to react quickly to maintain
stability.[6] The control is effected by use of an external computer through signals provided by the tether. The tether is essential, since there are no suitably small and lightweight
power supplies which could be integrated into the robot.[6]
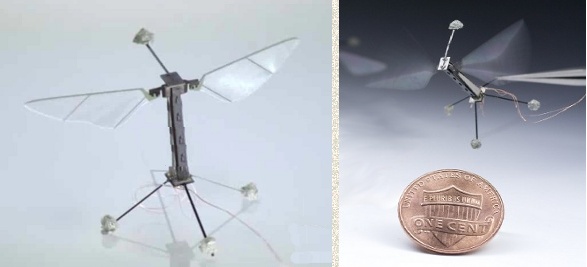
Sessile and flying robotic insects. (Still images from a Harvard University video; background of right image modified to reduce clutter.)
The Mobee pop-up fabrication technique facilitated development. Says Kevin Y. Ma, a coauthor of the report on the device recently published in
Science,[5] "We can now very rapidly build reliable prototypes, which allows us to be more aggressive in how we test them." The research team has tested twenty
prototypes in just six months.[6]
Among the non-surveillance applications of this technology are environmental monitoring,
search-and-rescue operations, and
crop pollination, just like real bees.[6] However, none of these applications are possible without smaller
batteries, integrated control systems, and stronger, more lightweight materials. At this time, the principal failure mechanism is failure of the wing hinges.[5,7]
References:
- The Day the Earth Stood Still, 1951, Robert Wise, Director, on the Internet Movie Database. I prefer that version over the 2008 version (The Day the Earth Stood Still, 2008, Scott Derrickson, Director), since the later version is too violent for my taste.
- Evan Ackerman, "Swarming Quadrotors Get Nano-ized," IEEE Spectrum, February 1, 2012.
- A Swarm of Nano Quadrotors, YouTube video, January 31, 2012.
- Caroline Perry, "In new mass-production technique, robotic insects spring to life," Harvard School of Engineering and Applied Sciences Press Release, February 15, 2012.
- Kevin Y. Ma, Pakpong Chirarattananon, Sawyer B. Fuller and Robert J. Wood, "Controlled Flight of a Biologically Inspired, Insect-Scale Robot," Science, vol. 340, no. 6132 (May 3, 2013), pp. 603-607.
- Caroline Perry, "Robotic insects make first controlled flight," Harvard School of Engineering and Applied Sciences Press Release, May 2, 2013.
- Elizabeth Pennisi, "Robotic Fly Takes to the Air, Briefly," Science Now, May 2, 2013.
Permanent Link to this article
Linked Keywords: nickel coin; dime coin; child; money; monetary; adult; automobile; environment; bulk confectionery; penny candy; convenience store; corner store; confectionery; confection; penny; sales tax; Wikimedia Commons; science fiction; robot; Gort; science fiction film; The Day the Earth Stood Still; Robert Wise; foot; Tom Swift, Jr.; consumer; consumer electronics; technology; tablet computer; desktop computer; portable media player; personal music player; stereophonic sound; stereo system; robotics; government; fly-on-the-wall; surveillance; disclaimer; Electronic Frontier Foundation; unwarranted; citizen; intelligence gathering; public safety; engineer; General Robotics, Automation, Sensing and Perception (GRASP) Laboratory; University of Pennsylvania; helicopter; human hand; YouTube video; synchronized; Harvard University; School of Engineering and Applied Sciences; Wyss Institute for Biologically Inspired Engineering; insect; coin-sized; monolithic; bee; coin; subliminal stimulus; subliminal; millimeter; mass; milligram; US quarter; wing; airfoil; laminate; lamination; material; carbon fiber; titanium; brass; ceramic; adhesive; Kapton; hinge; laser cutting; laser-cut; National Science Foundation; Robert J. Wood; Associate Professor; Electrical Engineering; piezoelectricity; piezoelectric; tether; tethered; flight dynamics; control system; longitudinal static stability; stability; power supply; Science; prototype; search-and-rescue; crop pollination; battery; The Day the Earth Stood Still, 1951, Robert Wise, Director; The Day the Earth Stood Still, 2008, Scott Derrickson, Director.