Autonomous Roving
November 15, 2013
One lesson a child learns early in life is that
he can't always get what he wants. There are limits to his parents' patience and wallet. When a person starts to make decisions for himself, he's then faced with the "
no free lunch" principle, which is more formally known to
economists as
opportunity cost. No matter what it's called, it's the idea that you can't get something for nothing, and it limits the number of
logical economic transactions.
In
physics, there are similar "no free lunch" limits. There's
conservation of mass, by which we can't expect to find more
mass in a system, or its
energy equivalent, no matter what
experiment we perform. Another important physical limit is the
speed of light, which has many
technological consequences.
Antoine Lavoisier (1743-1794)
Extensive experiments by Lavoisier in 1774 showed that the mass of the products of a chemical reaction was always the same as that of the reactants.
Lavoisier is typically credited with the law of mass conversation, although there was prior evidence for this.[1]
(Detail from an 1801 engraving, via Wikimedia Commons.)
The speed of light is an important limitation in
electronics, since you can't have a
circuit operate faster than your ability to shuttle
signals from one place to another. It takes light a little more than 0.03
nanoseconds to travel a
centimeter in
free space, and typically more than 0.05 nanoseconds to travel this same distance in an electronic circuit.
An electrical signal traveling from one side of a centimeter-size
computer chip to another, and back again, can only do this as fast as 10
GHz, so there's a reason why
CPU chips are small; and, why they
clock at less than half this rate.
At
planetary distances, the speed of light becomes very noticeable. We have a few
spacecraft and
rovers at
Mars, which has a minimum distance to
Earth of about 54.6 million
km, and a farthest distance to Earth of 401 million km. The
average distance to Mars is about 225 million km, for a round trip travel of light of 25 minutes. As this article is being written, a round trip to Mars for light was about half an hour.[2]
This time delay for radio signals is a problem for the rovers, since it's impossible for an operator on Earth to drive in
real time. There's the further problem that the
data rate of much less than a
megabit per second, which makes
high resolution imaging difficult. The usual procedure is to survey the
terrain, program a small jaunt in a good direction, signal the rover, and then wait. After a time, your rover receives the movement
commands, and it travels where directed.
By now, everyone is familiar with the progress being made in research on
self-driving automobiles.[3-4] I, for one, will welcome being able to read, instead of driving, on long
highway trips. It would be nice to apply this same technology to Martian rovers, but we need to be cautious. If our rover gets stuck in a ditch, there's no
tow truck available to haul it out.
There's also the problem, beyond mere
navigation, of where might be an interesting place to travel. A team of
scientists from the
Jet Propulsion Laboratory of the
California Institute of Technology (Pasadena, California), and the
NASA Ames Research Center (Moffett Field, California) has taken up the challenge of sorting the interesting
rocks and
soil from the average terrain. In a recent article in
Geophysical Research Letters, they described their TextureCam system for identification of interesting specimens.[5-6]
Says study coauthor,
Kiri Wagstaff, a
computer scientist and
geologist at JPL,
"We currently have a micromanaging approach to space exploration... While this suffices for our rovers on Mars, it works less and less well the further you get from the Earth. If you want to get ambitious and go to Europa and asteroids and comets, you need more and more autonomy to even make that feasible."[6]
The TextureCam system has a
stereo camera for
3D image acquisition, and it also has the ability to identify interesting rocks for further study. By prioritizing what's scientifically important, only the interesting rocks need to have their
photographs sent back to Earth. The TextureCam is being trained using the
neural network approach of showing it Martian images of scientifically important rocks taken by rover missions.
The authors assert that the image classifier could be implemented in a
field programmable gate array (FPGA) for maximal
efficiency.[5] The TextureCam was successfully tested in the rocky landscape of the
Mojave Desert, which acted as an
analog for the Martian surface.[6]
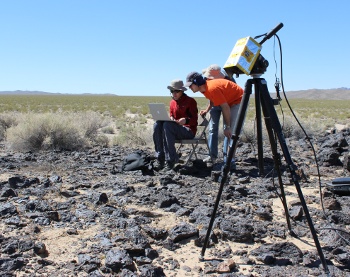
JPL TextureCam test in the Mojave Desert.
Aside from some sparse vegetation, the desert terrain is similar to what exists on Mars.
(JPL photo by Kiri Wagstaff.)
The first small steps to autonomous rover navigation have been made on Mars using, first, the
Opportunity rover; and, just last summer, the more complex
Curiosity rover.[7-8] Curiosity has been on Mars for more than 400
Martian days, and
it had traveled 7.2 km (4.5 mi) at the end of October, 2013.
In a preparatory test in mid-August, rover operators targeted a safe area, and Curiosity plotted a drive through it. Then, on August 27, Curiosity was allowed to autonomously navigate to a selected target destination. [7] Said
Mark Maimone, a rover
engineer and driver at JPL, "Curiosity takes several sets of stereo pairs of images, and the rover's computer processes that information to map any geometric hazard or rough terrain... The rover considers all the paths it could take to get to the designated endpoint for the drive and chooses the best one."[7]
This drive, on the mission's 376th Martian day, was just 33
feet (10
meters), and it was part of a long rover trek from an area of exploration called "
Glenelg." Curiosity worked at Glenelg during the first half of the year, and it's now on its way to the next area of exploration, a three mile high
mountain called
Mount Sharp. The distance between Glenelg and Mount Sharp is more than five miles.[7]
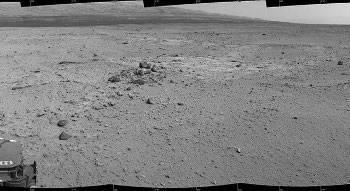
This is a mosaic of Curiosity navigational camera images on Sol (Martian day) 376, after the rover completed an autonomous navigation over unknown terrain.
(NASA/JPL-Caltech image)
Curiosity landed inside
Gale Crater on August 6, 2012, at a place now called
Bradbury Landing, named in honor of
science fiction author,
Ray Bradbury. As shown in the image, below, it traveled
eastwards for exploration at the Glenelg area. It is now moving
southwestward, to
Mount Sharp (more formally, Aeolis Mons), which is in the middle of Gale Crater. There are four waypoints along the intended route at which Curiosity will pause for scientific investigation.[7]
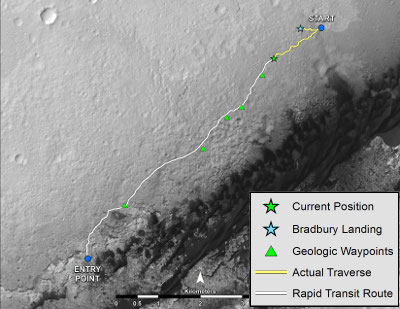
Intended, and actual path of the Curiosity rover to its entry point at the Mount Sharp area.
Curiosity landed at what's now called Bradbury Landing on August 6, 2012.
(NASA/JPL-Caltech/Univ. of Arizona image.)
Agricultural scientists from
New Zealand have developed a more "down to Earth" application of autonomous rover navigation. They've built a fully-autonomous Agri-Rover to provide real-time observation of
pasture quality. They say that "locating and treating
urine patches is the single biggest challenge..."[9] At least they're less
toxic than
acid spills on my
laboratory bench.
References:
- Robert D. Whitaker, "An Historical Note on the Conservation of Mass," Journal of Chemical Education, vol. 52, no. 10 (October, 1975), pp. 658-659.
- Mars Geocentric Distance, Emory University Physics Web Site.
- Carnegie Mellon Creates Practical Self-Driving Car Using Automotive-Grade Radars and Other Sensors, Carnegie Mellon University Press Release, September 4, 2013.
- Evan Ackerman, "CMU's Autonomous Car Doesn't Look like a Robot," IEEE Spectrum, September 9, 2013.
- K. L. Wagstaff, D. R. Thompson, W. Abbey, A. Allwood, D. L. Bekker, N. A. Cabrol, T. Fuchs, K. Ortega, "Smart, texture-sensitive instrument classification for in situ rock and layer analysis," Geophysical Research Letters, DOI: 10.1002/grl.50817, August 27, 2013.
- Upgrade to Mars rovers could aid discovery on more distant worlds, American Geophysical Union Press Release, no. 13-43, September 9, 2013.
- NASA'S Mars Curiosity Debuts Autonomous Navigation, JPL Press Release, August 27, 2013.
- Evan Ackerman, "NASA Lets Curiosity Rover Loose on Mars in Autonomous Driving Mode," IEEE Spectrum, August 29, 2013.
- Mars to Manawatu for robotic rover project, AgResearch News, October 31, 2013.
Permanent Link to this article
Linked Keywords: You Can't Always Get What You Want; There ain't no such thing as a free lunch; economist; opportunity cost; logical economic transaction; physics; conservation of mass; mass-energy equivalence; experiment; speed of light; technology; technological; Antoine Lavoisier (1743-1794); product; chemical reaction; reactant; engraving; Wikimedia Commons; electronics; circuit; signal; nanosecond; centimeter; vacuum; free space; integrated circuit; computer chip; hertz; GHz; central processing unit; CPU; clock signal; planet; planetary; spacecraft; space exploration rover; Mars; Earth; kilometrer; km; average; real time; data; bit rate; megabit per second; high resolution imaging; terrain; command; autonomous car; self-driving automobile; highway; tow truck; navigation; scientist; Jet Propulsion Laboratory; California Institute of Technology (Pasadena, California); NASA; Ames Research Center (Moffett Field, California); rock; soil; Geophysical Research Letters; Kiri Wagstaff; computer scientist; geologist; Europa; asteroid; comet; stereo camera; three-dimensional space; 3D; photograph; neural network; field programmable gate array; efficiency; Mojave Desert; analogy; analog; vegetation; Opportunity rover; Curiosity rover; Martian day; Mark Maimone; engineer; foot; feet; meter; Glenelg; mountain; Mount Sharp; Gale Crater; Bradbury Landing; science fiction; author; Ray Bradbury; east; southwest; agricultural scientist; New Zealand; pasture; quality; urine; toxicity; toxic; acid; laboratory; workbench; bench; cattle; cow; pasture; AgResearch, New Zealand.